
车轮滚动推动文明发展。对于大多数动物来说,翻滚运动并不容易完成。比如蜘蛛会蜷缩身体成球形,在重力或风力的作用下沿斜坡被动翻滚,毛虫则通过弯曲身体后释放来产生突然向前的短暂翻滚。果蝇幼虫在遇到危险时,能够通过弯曲身体并连续翻滚来快速逃离。传统观点认为这种翻滚是由重力与地面反作用力的不平衡驱动的,但实验数据表明,幼虫在翻滚时产生的切向力远大于重力,甚至在倒置的平台上也能翻滚,说明幼虫的翻滚可能无外力矩参与。这一矛盾促使研究者探索翻滚运动的真正机制。
2025年5月16日,浙江大学脑科学与脑医学学院、浙江大学医学院附属第四医院、双脑中心龚哲峰课题组在美国物理学会出版社旗下国际物理学顶级期刊Physical Review Letters(PRL)以“Mechanics of soft-body rolling motion without external torque”为题发表研究论文并被选为编辑推荐亮点论文(PRL Editors' Suggestion)。该论文报道了果蝇幼虫产生无外力矩的翻滚行为的肌肉功能机理以及背后的力学机制,并利用气动软体机器人成功验证了该力学模型。该研究通过功能成像和消融实验,揭示了轴向肌肉收缩、流体静力骨骼形变之间的相互作用,并系统地解释了顺序肌肉激活如何产生翻滚运动。该研究不仅推进了相关神经回路的研究,还为软体机器人领域提供了潜在的应用价值。该工作由龚哲峰课题组联合哈尔滨工业大学、上海交通大学、中国科学院生物物理研究所等单位合作完成。
果蝇幼虫作为一种全软体的多体节动物,其翻滚运动被发现具有无外力矩依赖的特性。本研究中,研究者通过转基因技术标记幼虫肌肉细胞,并结合光片显微镜分析,发现当幼虫身体弯曲成“C形”时,位于弯曲内侧的轴向肌肉收缩,而外侧肌肉伸长。这种收缩与松弛的交替进行,驱动了连续的翻滚运动。相比之下,环向肌肉的长度变化较小,对翻滚贡献有限。接着通过双光子激光精准消融肌肉,进一步验证了轴向肌肉的关键作用并量化了翻滚中断的肌肉相位关系。消融环形肌肉仅会降低翻滚速度,而消融轴向肌肉则导致翻滚完全停止,表明轴向肌肉的顺序激活是翻滚运动的必要条件。
研究者为此建立了力学模型以解释翻滚力矩的产生。在力学模型中,研究者将幼虫身体建模为具有均匀圆形截面的圆柱形软管,体壁材料为线性弹性,内部充满流体(流体静力骨骼结构)。轴向肌肉均匀分布在体壁周围,其收缩导致局部应变变化。通过理论推导,研究者建立了身体曲率κ与肌肉收缩应变Δε及内部压力 p 的关系。基于模型预测较高的内部压力能够支持更大的曲率,从而提升翻滚效率;对于分节的身体,每节轴向肌肉产生的力矩叠加形成总驱动力矩;在无外力情况下,幼虫通过调整弯曲方向实现翻滚和整体旋转,且角动量守恒;翻滚方向由肌肉激活的顺序决定,与“C形”弯曲的开口方向无关。这些预测结果均为实验所证实。
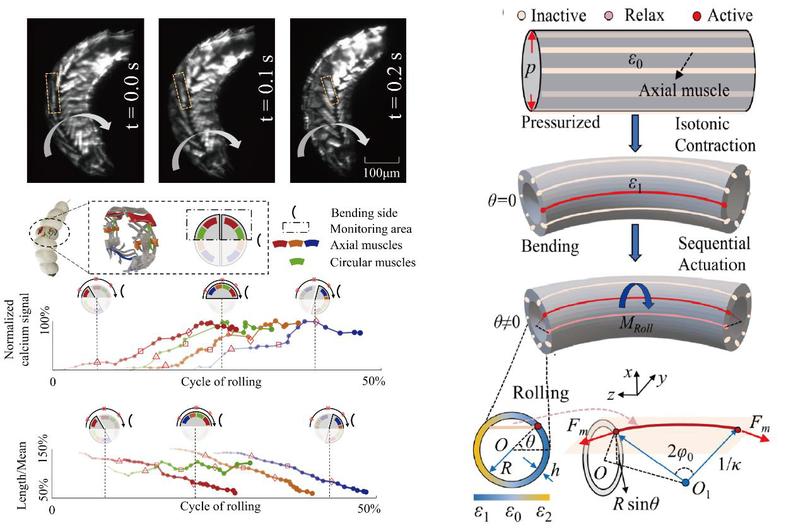
图一 果蝇幼虫翻滚行为的肌肉收缩顺序及其力学模型
为了验证模型,研究者设计了一种气动软体翻滚机器人,其结构由四个均匀分布的气动腔室组成,通过顺序充气模拟肌肉收缩。机器人能够连续翻滚,且在一部分腔室失效时,通过调整弯曲方向仍能维持翻滚,展现了与幼虫相似的鲁棒性。值得注意的是,由于气动腔室通过伸长而非收缩驱动,机器人的翻滚方向与幼虫相反。
哈尔滨工业大学(深圳)梁旭东、浙江大学脑科学与脑医学学院龚哲峰组博士生丁一淼,上海交通大学袁子浩为论文的共同第一作者,浙江大学龚哲峰、中国科学院生物物理研究所司光伟、上海交通大学陈飞飞、哈尔滨工业大学(深圳)梁旭东为本文共同通讯作者。本研究工作受国家自然科学基金委员会交叉学部重大项目,科技创新2030-“脑科学与类脑研究”重大项目和浙江省重点研发计划等资助。
浙江大学脑科学与脑医学学院、双脑中心龚哲峰课题组致力于研究以果蝇幼虫为模式动物的软体运动的神经控制机制及其仿生,课题组正在招聘博士后研究人员和科研助理,诚挚欢迎优秀青年人才加入。

